在提高硬件系統抗干擾能力的同時軟件抗干擾以其設計靈活節省硬件資源可靠性好越來越受到重視下面以MCS單片機系統為例對微機系統軟件抗干擾方法進行研究
軟件抗干擾方法的研究
在工程實踐中軟件抗干擾研究的內容主要是 一消除模擬輸入信號的嗓聲(如數字濾波技術)二程序運行混亂時使程序重入正軌的方法本文針對後者提出了幾種有效的軟件抗干擾方法
指令冗余
CPU取指令過程是先取操作碼再取操作數當PC受干擾出現錯誤程序便脫離正常軌道亂飛當亂飛到某雙字節指令若取指令時刻落在操作數上誤將操作數當作操作碼程序將出錯若飛 到了三字節指令出錯機率更大
在關鍵地方人為插入一些單字節指令或將有效單字節指令重寫稱為指令冗余通常是在雙字節指令和三字節指令後插入兩個字節以上的NOP這樣即使亂飛程序飛到操作數上由於空操作指令NOP的存在避免了後面的指令被當作操作數執行程序自動納入正軌
此外對系統流向起重要作用的指令如RET RETILCALLLJMPJC等指令之前插入兩條NOP也可將亂飛程序納入正軌確保這些重要指令的執行
攔截技術
所謂攔截是指將亂飛的程序引向指定位置再進行出錯處理通常用軟件陷阱來攔截亂飛的程序因此先要合理設計陷阱其次要將陷阱安排在適當的位置
軟件陷阱的設計
當亂飛程序進入非程序區冗余指令便無法起作用通過軟件陷阱攔截亂飛程序將其引向指定位置再進行出錯處理軟件陷阱是指用來將捕獲的亂飛程序引向復位入口地址H的指令通常在EPROM中非程序區填入以下指令作為軟件陷阱
NOP
NOP
LJMP H
其機器碼為
陷阱的安排
通常在程序中未使用的EPROM空間填最後一條應填入當亂飛程序落到此區即可自動入軌在用戶程序區各模塊之間的空余單元也可填入陷阱指令當使用的中斷因干擾而開放時在對應的中斷服務程序中設置軟件陷阱能及時捕獲錯誤的中斷如某應用系統雖未用到外部中斷外部中斷的中斷服務程序可為如下形式
NOP
NOP
RETI
返回指令可用RETI也可用LJMP H如果故障診斷程序與系統自恢復程序的設計可靠 完善用LJMP H作返回指令可直接進入故障診斷程序盡早地處理故障並恢復程序的運行
考慮到程序存貯器的容量軟件陷阱一般K空間有個就可以進行有效攔截
軟件看門狗技術
若失控的程序進入死循環通常采用看門狗技術使程序脫離死循環通過不斷檢測程序循環運行時間若發現程序循環時間超過最大循環運行時間則認為系統陷入死循環需進行出錯處理
看門狗技術可由硬件實現也可由軟件實現 在工業應用中嚴重的干擾有時會破壞中斷方式控制字關閉中斷則系統無法定時喂狗硬件看門狗電路失效而軟件看門狗可有效地解決這類問題
筆者在實際應用中采用環形中斷監視系統用定時器T監視定時器T用定時器T監視主程序主程序監視定時器T采用這種環形結構的軟件看門狗具有良好的抗干擾性能大大提高了系統可靠性對於需經常使用T定時器進行串口通訊的測控系統則定時器T不能進行中斷可改由串口中斷進行監控(如果用的是MCS系列單片機也可用T代替T進行監視)這種軟件看門狗監視原理是在主程序T中斷服務程序T中斷服務程序中各設一運行觀測變量假設為MWatchTWatch TWatch主程序每循環一次MWatch加1同樣TT中斷服務程序執行一次TWatch TWatch加1在T中斷服務程序中通過檢測TWatch的變化情況判定T運行是否正常在T中斷服務程序中檢測MWatch的變化情況判定主程序是否正常運行在主程序中通過檢測TWatch的變化情況判別T是否正常工作若檢測到某觀測變量變化不正常比如應當加而未加則轉到出錯處理程序作排除故障處理當然對主程序最大循環周期定時器T和T定時周期應予以全盤合理考慮限於篇幅不贅述
系統故障處理自恢復程序的設計
單片機系統因干擾復位或掉電後復位均屬非正常復位應進行故障診斷並能自動恢復非正常復位前的狀態
非正常復位的識別
程序的執行總是從H開始導致程序從 H開始執行有四種可能一系統開機上電復位二軟件故障復位三看門狗超時未喂狗硬件復位 四任務正在執行中掉電後來電復位四種情況中除第一種情況外均屬非正常復位需加以識別
硬件復位與軟件復位的識別
此處硬件復位指開機復位與看門狗復位硬件復位對寄存器有影響如復位後PC=H SP=HPSW=H等而軟件復位則對SPSPW無影響故對於微機測控系統當程序正常運行時將SP設置地址大於H或者將PSW的第位用戶標志位在系統正常運行時設為那麼系統復位時只需檢測PSW標志位或SP值便可判此是否硬件復位圖是采用PSW作上電標志位判別硬軟件復位的程序流程圖
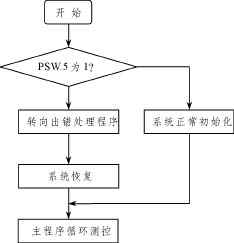
圖 硬軟件復位識別流程圖
此外由於硬件復位時片內RAM狀態是隨機的而軟件復位片內RAM則可保持復位前狀態因此可選取片內某一個或兩個單元作為上電標志設 H用來做上電標志上電標志字為H若系統復位後H單元內容不等於H則認為是硬件復位否則認為是軟件復位轉向出錯處理若用兩個單元作上電標志則這種判別方法的可靠性更高
開機復位與看門狗故障復位的識別
開機復位與看門狗故障復位因同屬硬件復位 所以要想予以正確識別一般要借助非易失性RAM或者EEROM當系統正常運行時設置一可掉電保護的觀測單元當系統正常運行時在定時喂狗的中斷服務程序中使該觀測單元保持正常值(設為 AAH)而在主程中將該單元清零因觀測單元掉電可保護則開機時通過檢測該單元是否為正常值可判斷是否看門狗復位
正常開機復位與非正常開機復位的識別
識別測控系統中因意外情況如系統掉電等情況引起的開機復位與正常開機復位對於過程控制系統尤為重要如某以時間為控制標准的測控系統完成一次測控任務需小時在已執行測控分鐘的情況下系統電壓異常引起復位此時若系統復位後又從頭開始進行測控則會造成不必要的時間消耗因此可通過一監測單元對當前系統的運行狀態系統時間予以監控將控制過程分解為若干步或若干時間段每執行完一步或每運行一個時間段則對監測單元置為關機允許值不同的任務或任務的不同階段有不同的值若系統正在進行測控任務或正在執某時間段則將監測單元置為非正常關機值那麼系統復位後可據此單元判系統原來的運行狀態並跳到出錯處理程序中恢復系統原運行狀態
非正常復位後系統自恢復運行的程序設計
對順序要求嚴格的一些過程控制系統系統非正常復位否一般都要求從失控的那一個模塊或任務恢復運行所以測控系統要作好重要數據單元參數的備份如系統運行狀態系統的進程值當前輸入輸出的值當前時鐘值觀測單元值等這些數據既要定時備份同時若有修改也應立即予以備份
當在已判別出系統非正常復位的情況下先要恢復一些必要的系統數據如顯示模塊的初始化片外擴展芯片的初始化等其次再對測控系統的系統狀態運行參數等予以恢復包括顯示界面等的恢復之後再把復位前的任務參數運行時間等恢復 再進入系統運行狀態
應當說明的是真實地恢復系統的運行狀態需 要極為細致地對系統的重要數據予以備份並加以數據可靠性檢查以保證恢復的數據的可靠性
其次對多任務多進程測控系統數據的恢復需考慮恢復的次序問題筆者實際應用的數據恢復過程流程圖如圖所示
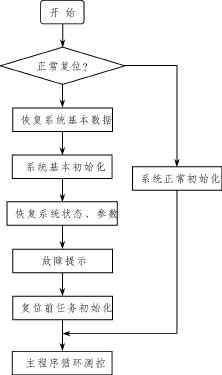
圖 系統自恢復程序流程圖
圖中恢復系統基本數據是指取出備份的數據覆蓋當前的系統數據系統基本初始化是指對芯片顯示輸入輸出方式等進行初始化要注意輸入輸出的初始化不應造成誤動作而復位前任務的初始化是指任務的執行狀態運行時間等
結束語
對於軟件抗干擾的一些其它常用方法如數字濾波RAM數據保護與糾錯等限於篇幅本文未作討論在工程實踐中通常都是幾種抗干擾方法並用互相補充 完善才能取得較好的抗干擾效果從根本上來說硬件抗干擾是主動的而軟件是抗干擾是被動的細致周到地分析干擾源硬件與軟件抗干擾相結合完善系統監控程序設計一穩定可靠的單片機系統是完全可行的
From:http://tw.wingwit.com/Article/program/qrs/201311/11074.html